
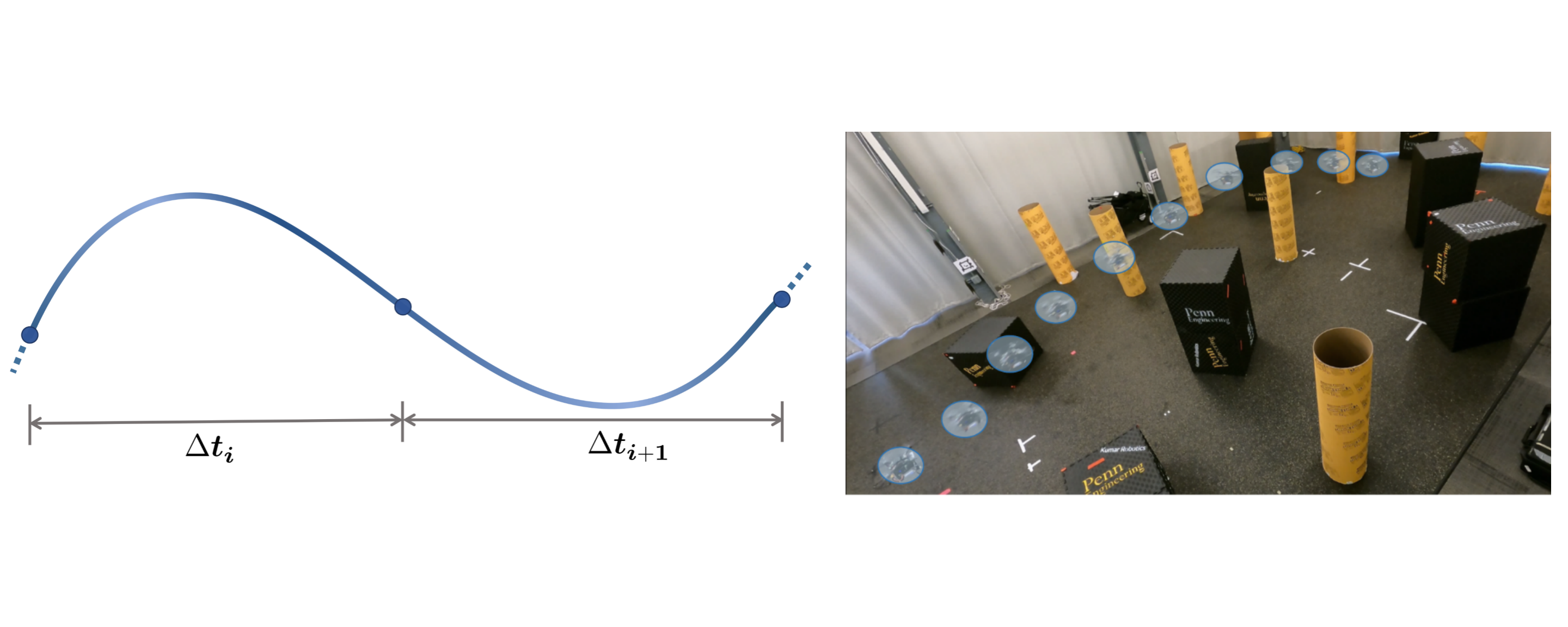
Time-optimal Trajectory Optimization
Structured motion plans for dynamically feasible robot maneuvers in cluttered spaces.
I'm Yuwei, a fourth-year Ph.D. candidate in Electrical and Systems Engineering at the University of Pennsylvania, in the General Robotics, Automation, Sensing, and Perception (GRASP) Laboratory, under the supervision of Prof. Vijay Kumar. My research focuses on motion planning and trajectory optimization for mobile robots, particularly in dynamic, uncertain, and complex real-world environments. I received my B.Eng. degree in Transportation Engineering from Beijing Jiaotong University, China, in 2019, and my M.S.E. degree in Systems Engineering from the University of Pennsylvania in 2022. Before my Ph.D., I worked with Prof. Fei Gao on trajectory optimization for quadrotors. My research interests are:
Structured motion plans for dynamically feasible robot maneuvers in cluttered spaces.
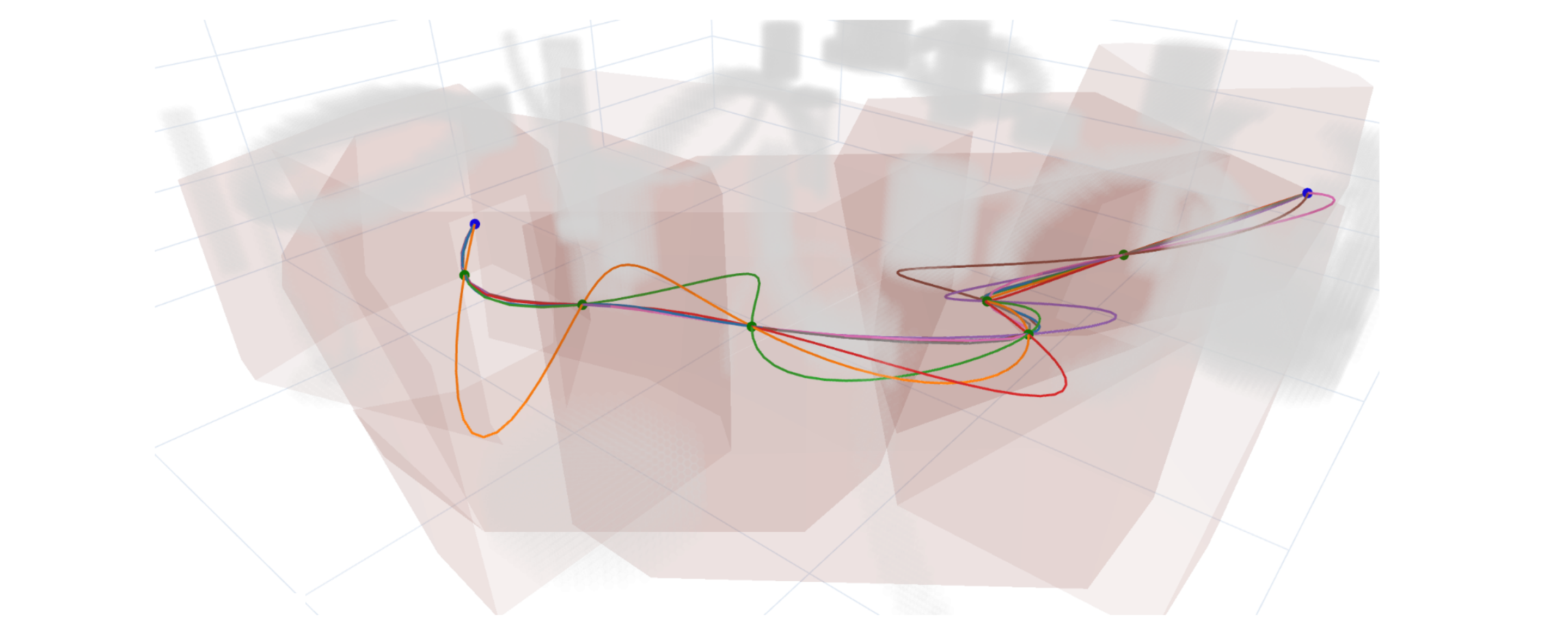
Efficient representations of safe regions that keep planning light yet reliable.
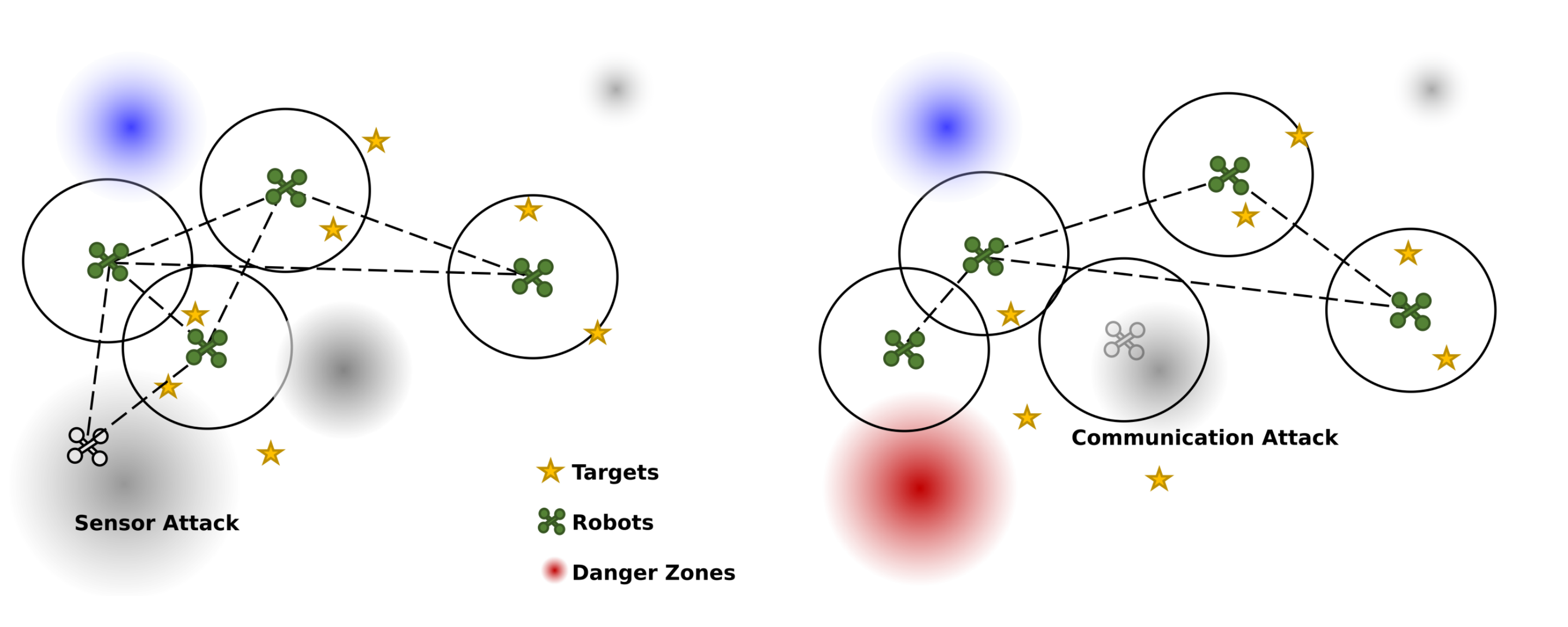
Robust policies that keep teams resilient under uncertainty and hazards.
Launch the motion planning demos to experiment with trajectories in your browser.